虛擬仿真技術 自動駕駛測試降本增效的加速器
自動駕駛作為智能汽車產業的核心技術,其發展離不開海量、安全、高效的測試驗證。傳統實車測試面臨成本高昂、場景有限、安全風險大等挑戰。在此背景下,虛擬仿真技術憑借其在計算機軟硬件技術開發領域的突破,正成為破解自動駕駛測試瓶頸、加速智能汽車產業發展的關鍵驅動力。
一、 虛擬仿真:構建無限可能的測試“元宇宙”
虛擬仿真技術,是通過計算機軟硬件技術,構建一個高度逼真、可交互的數字化虛擬環境。對于自動駕駛測試而言,這個環境包含了精細還原的道路、交通標志、建筑物、天氣(如雨、雪、霧、強光),以及智能體仿真模型(如行人、其他車輛、動物等)。其核心優勢在于:
- 場景無限擴展:工程師可以在仿真平臺中快速生成并組合數以百萬計的測試場景,包括日常駕駛、極端工況(如“鬼探頭”、車輛失控)以及現實中難以復現或高風險的長尾場景,極大地豐富了測試用例的覆蓋度和多樣性。
- 成本顯著降低:虛擬測試無需消耗實體車輛、燃油、場地租賃和人力跟車成本,也避免了車輛磨損和事故風險。一套仿真系統可以7×24小時不間斷運行,支持多任務并行測試,將單車測試成本降低數個數量級。
- 效率與安全性革命:仿真測試以“加速時間”運行,可在數小時內模擬現實世界中數年的行駛里程,快速積累測試里程和數據。所有高風險測試均在虛擬世界中進行,徹底杜絕了對人員和財產的潛在威脅。
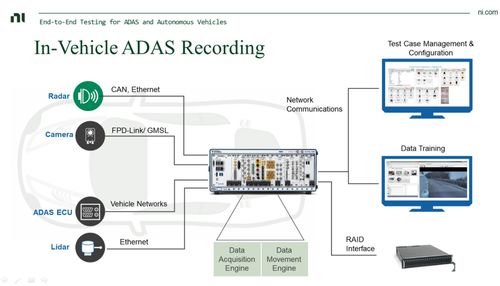
- 數據驅動迭代:仿真平臺能詳盡記錄每一次測試的完整數據流(傳感器數據、決策邏輯、控制指令等),為算法模型的訓練、驗證和迭代優化提供高質量、可追溯的數據燃料。
二、 計算機軟硬件技術開發的深度賦能
虛擬仿真技術的效能提升,直接依賴于底層計算機軟硬件技術的持續進步。
- 硬件層面:高性能計算(HPC)集群與圖形處理器(GPU)的并行計算能力,是處理復雜物理渲染、大量AI智能體行為模擬和海量傳感器數據實時生成的核心。專用傳感器仿真硬件(如激光雷達仿真器)能生成更接近真實物理特性的信號數據。云計算與邊緣計算的結合,使得大規模分布式仿真與實時性要求高的仿真(如硬件在環HIL)成為可能。
- 軟件與算法層面:
- 游戲引擎與物理引擎:如Unity、Unreal Engine等,提供了高保真的3D場景渲染和基礎物理交互,是構建視覺逼真世界的基石。專業的車輛動力學、傳感器物理模型則保證了車輛行為與感知數據的真實性。
- 人工智能與建模:利用AI技術(特別是生成式AI和強化學習)可以自動生成海量、合理的測試場景,并驅動虛擬交通參與者表現出更擬人化、多樣化的行為,提升測試的復雜度和真實性。數字孿生技術能夠將真實道路或車輛高精度映射到虛擬世界,實現虛實結合測試。
- 中間件與標準化:ROS/ROS2等機器人操作系統和仿真接口標準化工作,促進了不同仿真工具鏈的兼容與集成,構建了更開放的產業生態。
三、 推動智能汽車產業全鏈條發展
虛擬仿真技術的應用已貫穿智能汽車研發、測試、驗證乃至法規制定的全生命周期。
- 研發早期驗證:在車輛硬件制造出來之前,即可進行算法原型開發與可行性驗證,實現“軟件定義汽車”的敏捷開發。
- 大規模回歸測試:作為持續集成/持續部署(CI/CD)流程的關鍵環節,對每次算法更新進行自動化回歸測試,確保系統穩定性。
- 安全評估與法規合規:為自動駕駛系統的安全評估提供可量化、可復現的測試依據。全球監管機構(如歐盟、中國)已開始探索將虛擬測試里程納入安全認證標準,加速產品上市進程。
- 供應鏈協同:主機廠、算法供應商、芯片廠商等可在統一的仿真平臺上進行部件與系統的聯合調試與性能評估,提升協作效率。
虛擬仿真技術,是計算機軟硬件技術在汽車產業深度融合的典范。它不僅為自動駕駛測試提供了降本增效的革命性工具,更通過構建一個數據閉環的“數字試驗場”,從根本上改變了智能汽車的研發范式。隨著仿真保真度的不斷提高、與真實世界數據的持續校準以及產業標準的逐步完善,虛擬仿真技術必將與實路測試更緊密地結合,形成“虛實融合”的完整驗證體系,為智能汽車產業的安全、可靠、快速發展注入強大而持久的動力。
如若轉載,請注明出處:http://m.bywlgzs.cn/product/75.html
更新時間:2026-04-12 03:22:42